- English
- 简体中文
- Afrikaans
- שפה עברית
- icelandic
- Hrvatski
- Монгол хэл
- Lëtzebuergesch
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- Dansk
- Suomi
- Türkçe
- العربية
- Indonesia
- Norsk
- český
- ελληνικά
- فارسی
- български
- Latine
- Slovenský jazyk
- Slovenski
- Srpski језик
- বাংলা ভাষার
- हिन्दी
- Pilipino
- Gaeilge
- تمل
- український
- Javanese
- தமிழ்
- नेपाली
- Burmese
- ລາວ
- Қазақша
- Azərbaycan

ບ້ານ > ສິ່ງທີ່ພວກເຮົາເຮັດ > ອະໄຫລ່ Screwdriver ອັດສະລິຍະ > ຕົວຄວບຄຸມ screwdriver ອັດສະລິຍະ > ເຄື່ອງຄວບຄຸມພະລັງງານ Screwdriver ໄຟຟ້າ



ເຄື່ອງຄວບຄຸມພະລັງງານ Screwdriver ໄຟຟ້າ
ເຄື່ອງຄວບຄຸມພະລັງງານ Screwdriver ໄຟຟ້ານີ້ຮັບປະກັນການປະຕິບັດທີ່ດີທີ່ສຸດແລະປະສິດທິພາບໂດຍການສະຫນອງລະດັບພະລັງງານທີ່ຈໍາເປັນໃຫ້ກັບ screwdriver. ມັນອາດຈະປະກອບມີລັກສະນະເຊັ່ນ: ການຄວບຄຸມແຮງດັນ, ກົດລະບຽບໃນປະຈຸບັນ, ແລະກົນໄກຄວາມປອດໄພເພື່ອປົກປ້ອງທັງ screwdriver ແລະຜູ້ໃຊ້.
ຕົວແບບ:YM-2448-05-V2
ສົ່ງສອບຖາມ
ລາຍລະອຽດຜະລິດຕະພັນ
Screwdriver Power Controller ມີບົດບາດສໍາຄັນໃນການເພີ່ມປະສິດທິພາບການເຮັດວຽກໂດຍລວມແລະຄວາມຫນ້າເຊື່ອຖືຂອງ screwdrivers ໄຟຟ້າໂດຍການສະຫນອງຕົວກໍານົດການພະລັງງານທີ່ເຫມາະສົມສໍາລັບການດໍາເນີນການຂອງເຂົາເຈົ້າ.
ການເກັບຮັກສາຂໍ້ມູນ YM-2448-05-V2 ZNJJ Series Screwdriver Controller
ລາຍລະອຽດຜະລິດຕະພັນ:
ປະເທດຕົ້ນກໍາເນີດ: ຈີນ
ຊື່ຍີ່ຫໍ້: XYD
ໃບຢັ້ງຢືນ: CE
P/N: S03004000300001
ເງື່ອນໄຂການຈ່າຍເງິນ ແລະການຂົນສົ່ງ:
ຈໍານວນຄໍາສັ່ງຕໍາ່ສຸດທີ່: 1set
ລາຄາ: ຕໍ່ລອງໄດ້
ລາຍລະອຽດການຫຸ້ມຫໍ່: ກ່ອງເຈ້ຍ
ເວລາສົ່ງ: 1-4 ອາທິດ
ເງື່ອນໄຂການຈ່າຍເງິນ: TT
ຄຸນລັກສະນະ
1. ຕົວຄວບຄຸມພະລັງງານ Screwdriver ໄຟຟ້າອະນຸຍາດໃຫ້ມີຄວາມຍືດຫຍຸ່ນຫຼາຍວຽກງານ tightening ຂອງການປະສົມປະສານພາລາມິເຕີຕ່າງໆ.
2. ການບີບອັດຂໍ້ມູນສາມາດຖືກທົບທວນຄືນຜ່ານຕົວຄວບຄຸມຫຼືອັບໂຫລດຜ່ານພອດ RS485 ຫຼື RJ45.
3. ການເກັບຂໍ້ມູນສູງສຸດເຖິງ 1,000,000 ສໍາລັບແຕ່ລະຕົວຄວບຄຸມສາມາດສົ່ງອອກໄດ້ຢ່າງງ່າຍດາຍ.
4. ນັກພັດທະນາ SW ສາມາດໃຊ້ໂປໂຕຄອນ Modbus UDP ມາດຕະຖານເພື່ອຕິດຕໍ່ສື່ສານກັບຕົວຄວບຄຸມໂດຍບໍ່ມີບັນຫາໃດໆ.
5. ຫນ້າຈໍສໍາພັດ capacitive ເຮັດໃຫ້ມັນສະດວກຫຼາຍສໍາລັບການປະຕິບັດການດໍາເນີນການ.
6. ຟັງຊັນກວດຈັບສະກູເລື່ອນແລະສະກູທີ່ຊັດເຈນສາມາດຮັບປະກັນຂະບວນການຍຶດແຫນ້ນທີ່ຖືກຕ້ອງ.
7. ຄວາມໄວການອ່ານ 1 ຈຸດ/ອົງສາ ຫຼື 1ms/ຈຸດ. ສາມາດບັນທຶກໄດ້ທັງໝົດ 20,000 ຈຸດສຳລັບແຕ່ລະຂັ້ນຕອນການເຄັ່ງຄັດ.
8. ອັດຕາການສົ່ງສັນຍານ 10 Mbps/sec ຫຼື 100 Mbps/sec.
9. ການວິເຄາະເສັ້ນໂຄ້ງໃນເວລາທີ່ແທ້ຈິງຂອງແຮງບິດຍຶດ, ມຸມຍຶດ, ແລະແຮງບິດຈຸດບ່ອນນັ່ງ.
10. Curve ຂໍ້ມູນທີ່ຈະໄດ້ຮັບການບັນທຶກໃສ່ບັດ SD.
ຂໍ້ມູນຈໍາເພາະ
|
ຕົວແບບ |
YM-2448-05-V2 |
|
ແຮງດັນຂາເຂົ້າ |
AC 100V / 240V |
|
ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນ |
50/60HZ |
|
ປ້ອນຂໍ້ມູນປັດຈຸບັນ |
2.5A |
|
ແຮງດັນຂາອອກ |
DC 24V |
|
ປະຈຸບັນຜົນຜະລິດ |
5A |
|
ການນໍາໃຊ້ພະລັງງານ |
120W |
|
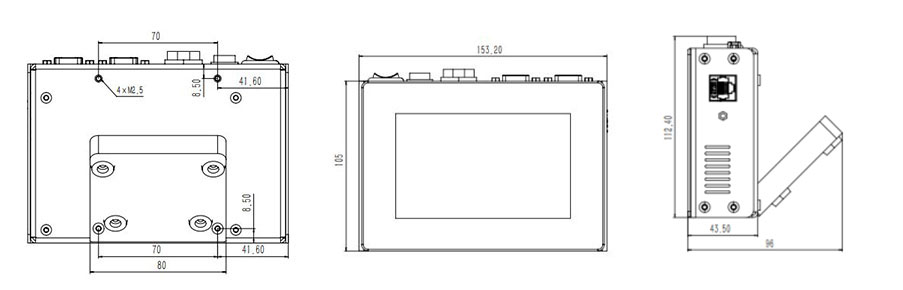
ຂະໜາດ(ມມ) |
153*44*105 |
|
ນ້ຳໜັກ(g) |
1.42 |
|
ການໂຕ້ຕອບການສື່ສານ |
RS485 / RS232 / DB15I/O /RJ45 |
ຫນ້າທີ່ຕົ້ນຕໍ
|
1, Torque ແລະຜົນຜະລິດຂໍ້ມູນມຸມ 2, ການກວດສອບມຸມທັງຫມົດ 3, ການຄັດເລືອກຫຼາຍວຽກງານ 4, ການຕັ້ງຄ່າພາກສ່ວນ 5, ການກວດສອບການພົວພັນ |
6, ເຄັ່ງຄັດຫຼາຍຂັ້ນຕອນ 7, ຈໍານວນຂອງຂັ້ນຕອນທີ່ເຄັ່ງຄັດ: 6 8, ຂໍ້ມູນການເກັບຮັກສາຄວບຄຸມ - ຜົນໄດ້ຮັບ 9, ດາວໂຫລດຜົນໄດ້ຮັບໂດຍຜ່ານການສື່ສານ 10, ຊ່ວຍປະຢັດເສັ້ນໂຄ້ງຜ່ານຊອບແວ |
11, ຊ່ວຍປະຢັດເສັ້ນໂຄ້ງອັດຕະໂນມັດໂດຍຜ່ານຊອບແວໄດ້ 12, Configurable ດິຈິຕອນ I/O 13, ໂປໂຕຄອນການສື່ສານ: Modbus UDP 14, ຈຸດຂໍ້ມູນ Curve: 1 ຈຸດ / ອົງສາທັງຫມົດ 20,000 ຈຸດ 15, ອັດຕາການສົ່ງຜ່ານ: ສະຫນັບສະຫນູນ 10M / 100M |
16, ການກວດສອບມຸມຂອງຈຸດນັ່ງ 17, ການກວດສອບ torque ຈຸດບ່ອນນັ່ງ 18, Tightening ການຊອກຄົ້ນຫາມຸມ 19, ການກວດພົບແຮງບິດ Clamping 20, ການວິເຄາະເສັ້ນໂຄ້ງທີ່ໃຊ້ເວລາທີ່ແທ້ຈິງ |
ຂະໜາດ
Hot Tags: Screwdriver ໄຟຟ້າຄວບຄຸມພະລັງງານ, ຈີນ, ຜູ້ຜະລິດ, ສະຫນອງ, ໂຮງງານຜະລິດ, ຄຸນະພາບ, ປັບແຕ່ງ, ກ້າວຫນ້າທາງດ້ານ, ລາຄາ
ປະເພດທີ່ກ່ຽວຂ້ອງ
ຕົວຄວບຄຸມ screwdriver ອັດສະລິຍະ
ຊອບແວ Terminal Screwdriver ອັດສະລິຍະ
IPC ສໍາລັບອັດສະລິຍະ Screwdriver
Screwdriver Power Adapter
Screwdriver Cable
Screwdriver Ergo ແຂນ
ສົ່ງສອບຖາມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອໃຫ້ການສອບຖາມຂອງທ່ານໃນແບບຟອມຂ້າງລຸ່ມນີ້. ພວກເຮົາຈະຕອບກັບທ່ານໃນ 24 ຊົ່ວໂມງ.